Time dependent optimization (PyTorch version)#
In this example, we use the inverse computing capibilities of NeuralMag in order to optimize the direction of an external field in order to control the magnetization dynamics of a single-domain particle. Specifilly, the field is optimized such that the magnetization is pointing in a given direction \(\vec{m}_\text{target}\) at time \(T\). This example is taken from [1] and reads
Simulation#
For this example, we use the JAX backend together with the Optax library for optimiz ### Import libraries Import libraries, set backend to JAX and reduce FEM quadrature order for better performance.
[1]:
import matplotlib.pyplot as plt
import numpy as np
import torch
from scipy import constants
from tqdm import tqdm
import neuralmag as nm
nm.config.backend = "torch"
nm.config.fem["n_gauss"] = 1
2025-05-13 13:49:14 NeuralMag:INFO [NeuralMag] Version 0.9.1
2025-05-13 13:49:14 NeuralMag:INFO [NeuralMag] Backend set to 'torch'.
Setup mesh and state#
Setup mesh, state and material parameters and set initial magnetization in z-direction.
[2]:
mesh = nm.Mesh((2, 2, 2), (5e-9, 5e-9, 5e-9))
state = nm.State(mesh)
state.material.Ms = 8e5
state.material.A = 1.3e-11
state.material.Ku = 1e5
state.material.Ku_axis = [0, 0, 1]
state.material.alpha = 0.1
state.m = nm.VectorFunction(state).fill((0, 0, 1))
2025-05-13 13:49:14 NeuralMag:INFO [Mesh] 3D, 2 x 2 x 2 (size = 5e-09 x 5e-09 x 5e-09)
2025-05-13 13:49:14 NeuralMag:INFO [NeuralMag] Set default device to 'cpu'.
2025-05-13 13:49:14 NeuralMag:INFO [NeuralMag] Set default dtype to 'float32'.
2025-05-13 13:49:14 NeuralMag:INFO [State] Running on device: cpu (dtype = torch.float32, backend = torch)
Set up external-field function#
Next, we set up the external-field function as dynamic attribute depending and the spherical angles \(\phi\) and \(\theta\).
[3]:
H = 2 * 1e5 / (constants.mu_0 * 8e5)
state.phi = lambda angles: angles[0]
state.theta = lambda angles: angles[1]
state.angles = [torch.pi / 2, torch.pi / 2]
h_ext = lambda angles: torch.stack(
[
H / 2 * torch.sin(angles[0]) * torch.cos(angles[1]),
H / 2 * torch.sin(angles[0]) * torch.sin(angles[1]),
H / 2 * torch.cos(angles[0]),
]
)
Set up effective field#
[4]:
nm.ExchangeField().register(state, "exchange")
nm.UniaxialAnisotropyField().register(state, "aniso")
nm.ExternalField(h_ext).register(state, "external")
nm.TotalField("exchange", "aniso", "external").register(state)
2025-05-13 13:49:16 NeuralMag:INFO [ExchangeField] Register state methods (field: 'h_exchange', energy: 'E_exchange')
2025-05-13 13:49:16 NeuralMag:INFO [UniaxialAnisotropyField] Register state methods (field: 'h_aniso', energy: 'E_aniso')
2025-05-13 13:49:16 NeuralMag:INFO [ExternalField] Register state methods (field: 'h_external', energy: 'E_external')
2025-05-13 13:49:16 NeuralMag:INFO [TotalField] Register state methods (field: 'h', energy: 'E')
Set up LLGSolver#
Next, we set up the LLGSolver defining angles as parameters in order to allow for efficient gradient computation.
[5]:
llg = nm.LLGSolver(state, parameters=["angles"])
2025-05-13 13:49:16 NeuralMag:INFO [LLGSolverTorch] Initialize RHS function
Set up optimizer#
Now, we define an Adams optimizer along with a L1 loss function and the target magnetization.
[6]:
optimizer = torch.optim.Adam(llg.parameters(), lr=0.05)
my_loss = torch.nn.L1Loss()
m_target = nm.VectorFunction(state).fill((0.5**0.5, 0, 0.5**0.5)).tensor
[ ]:
Perform optimization loop#
[7]:
logger = nm.ScalarLogger("time-dependent-optimization_torch/log.dat", ["step", "phi", "theta", "loss"])
for step in tqdm(range(100)):
state.step = step
optimizer.zero_grad()
m_pred = llg.solve(state.tensor([0.0, 0.05e-9]))
state.loss = my_loss(m_pred[-1], m_target)
state.loss.backward()
optimizer.step()
logger.log(state)
100%|█████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 100/100 [08:55<00:00, 5.36s/it]
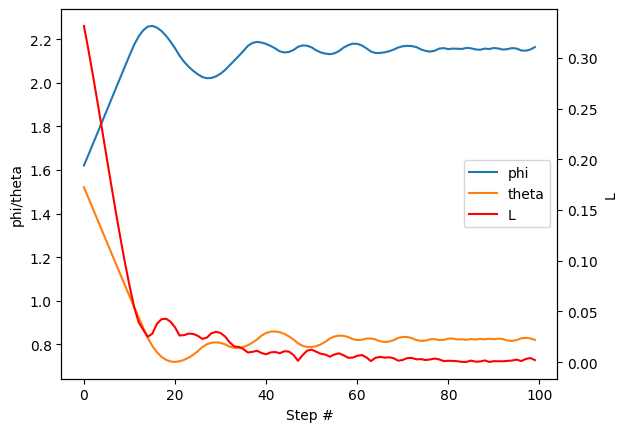
Plot the solution#
Finally, we plot the evolution of the field angles along with the loss function against the number of optimization steps.
[8]:
data = np.loadtxt("time-dependent-optimization_torch/log.dat")
fig, ax1 = plt.subplots()
(l1,) = ax1.plot(data[:, 0], data[:, 1], label="phi")
(l2,) = ax1.plot(data[:, 0], data[:, 2], label="theta")
ax1.set_xlabel("Step #")
ax1.set_ylabel("phi/theta")
ax2 = ax1.twinx()
(l3,) = ax2.plot(data[:, 0], data[:, 3], label="L", color="red")
ax2.set_ylabel("L")
lines = [l1, l2, l3]
labels = [line.get_label() for line in lines]
ax1.legend(lines, labels, loc="best")
plt.show()